
Purdue University Senior Design – EMT Assisting Robot
Location: Mechanical Engineering, Purdue University, IN
Timeframe: Fall 2019
Introduction:
In mass casualty incidents, EMTs face significant physical demands transporting equipment and patients across challenging terrain, often leading to responder fatigue and delayed care. An autonomous supply carrier robot could improve response efficiency and reduce physical strain on emergency personnel. The objective was to create a 1/2 scale robot capable of assisting EMTs in carrying supplies during high casualty situations with the following requirements: carry a Stokes Basket, support remote operation, provide reconnaissance capabilities (light and camera), carry 50 lbs, maintain 2-hour battery life with hot-swap capability, traverse curbs and small debris, remain cost-effective, and fit within pre-existing medical trailers (MCI).
Design & Development:
As Lead Systems Integrator, my primary responsibility was to work on the electronics for the drive and vision systems of the robot, assist in space management and other design aspects (such as the type of drive system, the frame of the robot, and the location of vision), and most importantly, code the multiple drive systems, vision system, and controls of the robot.
Electronics and System Integration:
I organized the wiring of the system to ease troubleshooting and created a test bench to control and affirm the quality of individual components. I helped organize and determine which system parts would need to be ordered to accomplish the aforementioned goals, managing a limited budget for the project while maximizing limited time.
Control Systems Development:
I created a UI system for controlling and using the robot, as well as viewing the camera feeds of the system. Using a top-down approach aligned to project goals, I coded subsystems for vision, drive, lights, and safety. I created 2 drive systems around an Xbox controller: a skid-steer mode (for more complex control) and a basic mode (one stick for forwards/back and one for left/right). I implemented safety features to prevent the robot from over-accelerating, hitting obstacles, and driving over different terrain styles using continuous control loops for obstacle detection and emergency stops.
Mechanical Design Challenges:
The project involved significant mechanical design work including creating a mounting bracket system for the treads of the tank drive system, developing a tread subsystem capable of supporting the robot weight while traversing terrain and performing with debris, mounting the vision system to get a full view without being blocked by the basket, mounting and fitting a gearbox system to attach to the drive wheel, determining the best orientation/shape of the tread system and location of the drive wheel, finding a safe location for the E-stop and other internal electronics with easy “hot-swap” access for the battery, and using a spring system that allowed the load to be distributed equally. All of this needed to be accomplished while efficiently machining parts with limited materials and managing project budget constraints.
Technical Challenges Addressed:
Motors exhibited large dead-band zones that required extensive tuning through the speed controllers. I troubleshot subsystem hysteresis and noise issues that affected control precision. Multiple long chains of loops in the code created queue delays that overloaded the system when numerous inputs were queued, requiring optimization of the control architecture.

Full Robot view with major internal components

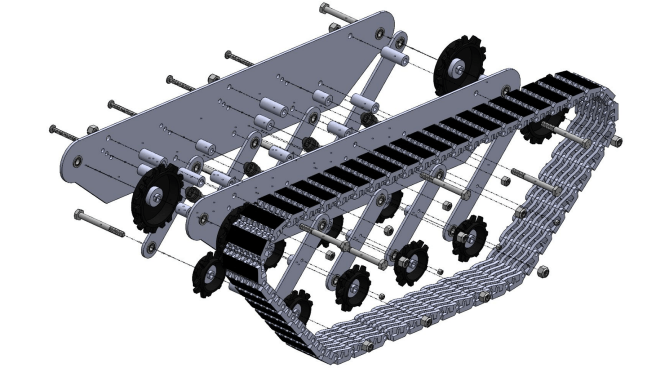
Tread Subsystem
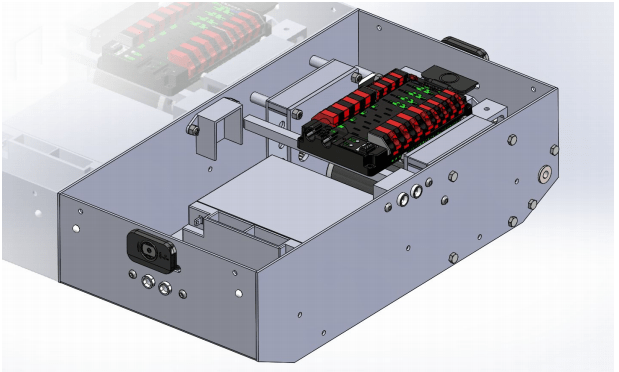
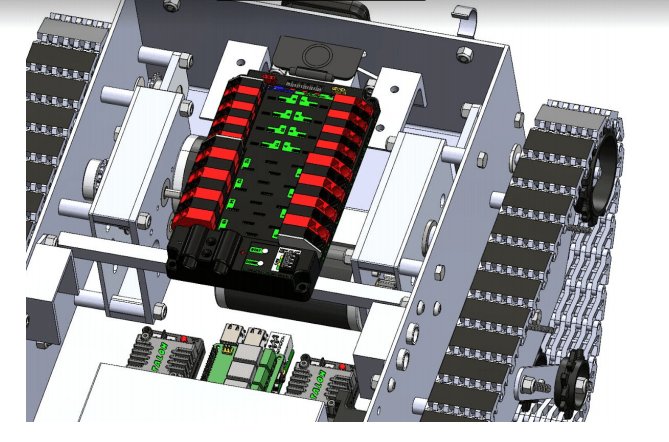
Better Internal View

Drive Wheel attachment to the gear box system

Vision System, Camera and Ultrasonic

Controller Layout

Full Robot
Evaluation:
The robot successfully met core requirements: it carried the 50 lb load including the Stokes Basket, achieved the 2-hour battery life with hot-swap capability, and traversed curbs and small debris as specified. The dual-mode drive system (skid-steer and basic) provided operators with both precision control for tight spaces and simplified operation for straightforward navigation. The vision system with ultrasonic sensors and camera feeds gave operators adequate situational awareness, though mounting position compromises were necessary to avoid basket obstruction. The safety implementation (continuous control loops for obstacle detection and emergency stops) prevented collisions during testing. The project stayed within budget constraints and fit the MCI trailer specifications.
However, several areas for improvement were identified: The static tension tread system struggled with varying loads and large terrain dips, indicating a need for a dampener non-static tension system that could adjust dynamically. The Bluetooth connection showed bandwidth limitations during extended operation. The dead-band zones on motors required more extensive calibration than anticipated, affecting idle input response. Queue delays from serial code execution revealed the need for a multi-threaded approach where each subsystem operates independently to avoid input backlog.
Conclusion:
This capstone project taught me how to lead systems integration across mechanical, electrical, and software domains under real-world constraints of budget, timeline, and customer requirements. Key technical lessons included understanding how dead-band zones affect motor control systems, implementing proper bearing press-fits and suspension subsystems (travel arms, tensioners, pretensioning), and recognizing the critical importance of multi-threaded architectures for real-time robotic control systems.
The experience of developing risk management algorithms, creating unified testing frameworks for subsystem integration, and balancing competing design constraints directly informed my approach to graduate research. The challenges of real-time control under communication bandwidth limitations and the importance of modular, testable code architecture became foundational principles I’ve applied throughout my robotics work at CMU.
